Aircraft
data (update all tables and graphs after having
fixed all dimensions)

The plane performance is studied with all the available
information. For this calculations, all dimensions must be stated first and all
formulas are referenced to the first dimensions so when a single value is
changed, like the cruise speed, the wingspan of the horizontal stabilizer or
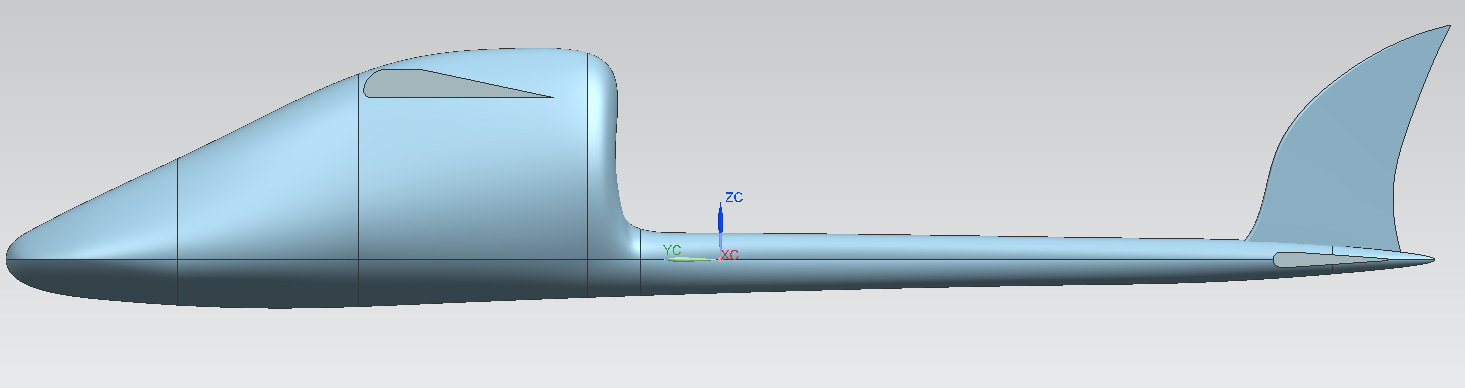
the fuselage shape, all the graphs and charts change in accordance.
Airfoils
Two airfoils are chosen for the wing and the horizontal stabilizer. The wing airfoil chosen is the Eppler E374, copying the airfoil of Reaper-like glider model studied before in similar aircrafts. These type of airfoils use the Eppler code, designed by Professor Richard Eppler based in some methods used in computational fluid dynamics for low Reynolds numbers.
Two airfoils are chosen for the wing and the horizontal stabilizer. The wing airfoil chosen is the Eppler E374, copying the airfoil of Reaper-like glider model studied before in similar aircrafts. These type of airfoils use the Eppler code, designed by Professor Richard Eppler based in some methods used in computational fluid dynamics for low Reynolds numbers.
“Professor Richard
Eppler is a pioneer in the field of computational aerodynamics. He wrote his
first codes using punched paper strips, the high speed main memory at these
times was a magnetic drum, which could hold several bytes.
Eppler developed a
very fast and elegant design method, based on conformal mapping, which is the
heart of his computer code. Because an airfoil also has to operate outside of
its design point(s), a fast integral boundary layer method and (for the
analysis of given airfoils) an accurate third order panel method (parabolic
velocity variation) was added. Furthermore the code offers possibilities to modify
the geometry, to calculate drag polars, and various plotting options. Due to
its early roots, the computer code has been developed as a batch code. Textual
and graphical output is directed to files, which makes the FORTRAN 77 code
easily portable and system independent. On the other hand, the input files are
quite cryptic and hard to handle for beginners. The elaborate description of
theory and code [Eppler, R. and Somers, D.: A Computer Program for the Design
and Analysis of Low-Speed Airfoils, NASA TM-80210, 1980] even contains an (now
outdated) version of the FORTRAN-IV program.
The strength of the
code is the design part and the fast analysis part, which makes it very well
suited for the design task. The results of the integral boundary layer method agree
astonishingly well with experiments, if the Reynolds numbers are above 500'000.
The design module can be used to design very smooth airfoils shapes, including
the leading edge region, which is often difficult with other codes. On the
other hand, the design method is quite abstract and difficult to handle for
beginners.
The boundary layer
analysis is performed using the calculated, inviscid (without friction)
velocity distributions as input; there is no direct coupling between boundary
layer flow and the external flow field. Transition prediction is performed by
testing the boundary layer parameters against a set of empirically derived
transition relations, which work quite well for attached flow in a wide range
of Reynolds numbers.
In the low Reynolds number
regime the results are usually not very accurate if a laminar separation bubble
or larger separated flow regions occur. This is a result of the integral
boundary layer method, which simply cannot model separation (this would require
some sort of coupling between boundary layer analysis and the calculation of
the external flow). The code has a option to perform a displacement iteration
in order to take the displacement effects of the boundary layer into account,
but there is no direct interaction, as, for example, in Xfoil. Recent (2007)
additions to the code however, are an improved model of laminar separation
bubbles and turbulent separation. The code itself is available for a fee
directly from Prof. Richard Eppler in Germany or from his US distributor Dan
Somers.”

Max thickness 10.9% at 34.3% chord. Max camber 2% at 38.9% chord

http://airfoiltools.com/airfoil/details?airfoil=e374-il
Performance graphs to be updated with Re number and high N critic
Performance graphs to be updated with Re number and high N critic
The horizontal stabilizer has a symmetric airfoil and one of
the simplest and most used in slow planes, the NACA 0012, with 12% thickness at
the 30% of the chord. The plane doesn’t need too much lift in the tail, forces
will be balanced by the angle of attack of the airfoil.


http://airfoiltools.com/airfoil/details?airfoil=n0012-il
change Re

























.jpg)















{kind=link}